Presented by Cecil – Thanks Cecil
LinuxCNC – Kinematic Calculations
From the LinuxCNC website, a short intro:
When we talk about CNC machines, we usually think about machines that are commanded to move to certain locations and perform various tasks. In order to have an unified view of the machine space, and to make it fit the human point of view over 3D space, most of the machines (if not all) use a common coordinate system called the Cartesian Coordinate System.
The Cartesian Coordinate system is composed of three axes (X, Y, Z) each perpendicular to the other two.
When we talk about a G-code program (RS274/NGC) we talk about a number of commands (G0, G1, etc.) which have positions as parameters (X- Y- Z-). These positions refer exactly to Cartesian positions. Part of the LinuxCNC motion controller is responsible for translating those positions into positions which correspond to the machine kinematics.
Presented by Prof Rudi, thanks Prof!
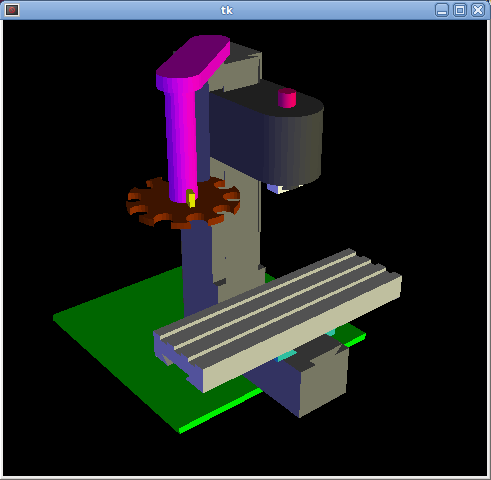
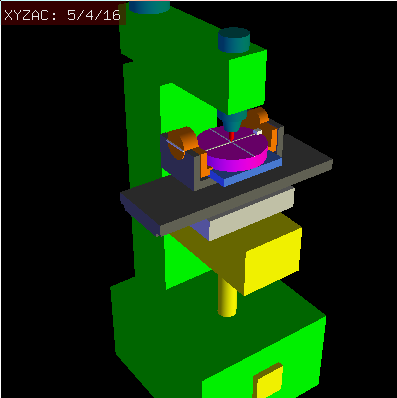
LinuxCNC – Vismach
This is the ability to simulate a CNC (Can be more than 3 Axes) all in software.
This was presented by Cecil to the club. Very good presentation, thank Cecil!
There are 4 parts, please download them.
Club Meeting – 22/8/2019
Mesa 7i76e
Prof Rudy presented some tips and tricks on setting up the Mesa card.
Very useful info!
Club Meeting – 25/7/2019
Ball Screw Calcs
Prof Rudy presented the calculations necessary for Ball screws.